-
Tweets35
-
Followers89
-
Following1K
-
Likes174

The Waabi team is headed to Vienna for ICRA, the International Conference on Robotics and Automation 2026, June 1–5! We're presenting four research papers and celebrating a major milestone — our very own @JurvandenBerg will be honored with the @IEEEorg Most Influential Paper Award. Come find us and explore the future of Physical AI and autonomous driving: waabi.ai/icra-2026


The latent-vs-pixel debate misses the point. GPT Image 2 shows what users notice: pixel-level fidelity. Latent models show what scales: compact semantic structure. We connect them by replacing VAE/RAE decoders with a Pixel Diffusion Decoder. Code and Model available: research.nvidia.com/labs/sil/proje… 🧵(1/N)
Awesome. NVIDIA dropped PiD - fast high-res latent decoding via pixel diffusion! - replace VAE - 4/8x upsampling - 2k decoding in <1s on RTX 5090 - works with FLUX.1/SD3/Z - rapid generation previews sharper details, much lower hardware lag compared to standard methods. research.nvidia.com/labs/sil/proje…
We scaled up Lyra to generate explorable 3D worlds! 🚀 Introducing Lyra 2.0 — turning a single image into a 3D world you can walk through, look back, and even drop a robot into 🤖 Code and Model available today! 🌐 Website: research.nvidia.com/labs/sil/proje… (1/N)
At #GTC26 we are showing AlpaDreams — generative, interactive closed-loop simulation for autonomous driving. World models generate environments in real time, policies or drivers interact, and the simulator updates the world. If you are at GTC, come by the booth and try it out!

This week at @NVIDIAGTC we're presenting AlpaDreams: a generative world model for driving simulation. Compared to standard video models, AlpaDreams is autoregressive, enabling updating the conditioning (simple bounding box world) in closed loop, and multiview-consistent.

A new generation in AV simulation is here! We are announcing AlpaDreams, a real time interactive generative world model for AV simualtion! Just a year ago it took minutes to generate a few seconds of video, today it is real time and interactive! research.nvidia.com/labs/sil/proje…
Here we introduce SAGE: Scalable Agentic 3D Scene Generation for Embodied AI, which can generate sim-ready 3D scenes with agents following user demands at scale, ready for robotic action generation. Paper, code, and SAGE-10k dataset are all released! nvlabs.github.io/sage/
Awesome to see @Waymo launching a new model! 🎉 We worked on a similar demo over a year ago — the code and checkpoints are already open-sourced here: 🔗 research.nvidia.com/labs/toronto-a… Love seeing continued momentum in autonomous driving research 🚗✨

We’re excited to introduce the Waymo World Model—a frontier generative mode for large-scale, hyper-realistic autonomous driving simulation built on @GoogleDeepMind’s Genie 3. By simulating the “impossible”, we proactively prepare the Waymo Driver for some of the most rare and
We are building a brain to power the entire Physical AI ecosystem. Our Physical AI Platform combines a verifiable end-to-end AI model capable of reasoning with the world's most advanced neural simulator. For the first time in the industry, one AI brain powers multiple applications—trucks and robotaxis—where progress in one directly improves the other. Proven in autonomous trucking. Now expanding to robotaxis. Built to scale across form factors, geographies, and environments. Learn more: waabi.ai/insights/waabi…

Physical AI's moment is here, and self-driving is the first manifestation of Physical AI that will scale. We have built a Physical AI Platform that enables true scale and generalizes across form factors, geographies, and environments. It is proven in autonomous trucking and we are now expanding to robotaxis. Our Platform combines a verifiable end-to-end AI model capable of reasoning with the world's most advanced neural simulator—powering the @Waabi_ai Driver. This approach enables, for the first time in the industry, a shared brain across both applications, meaning the same AI model will drive both trucks and robotaxis. This is important as any progress will directly benefit both verticals. Furthermore, our capabilities already cover highways and surface streets, which has enabled our Direct to Customer model in trucking, providing a big product advantage with the rest of the industry. This also means that we have already all the core capabilities needed for robotaxis, allowing us to enter very fast and seamlessly this new market. To achieve this, we have raised $1B USD of new capital, the largest fundraise in Canadian history. This capital will be used to accelerate commercial progress in autonomous trucks and to fuel our expansion into robotaxis. This funding includes an oversubscribed $750M Series C led by @khoslaventures Ventures and @G2VPLLC , as well as additional capital from @Uber tied to robotaxi development. We are thrilled to work with Uber to deploy robotaxis powered by the Waabi Driver on the Uber platform, the largest ridesharing network globally. Through this strategic partnership, we will deploy 25,000 or more Waabi Driver-powered robotaxis, substantially accelerating the adoption of robotaxis at scale. I am incredibly grateful to our team for making this vision a reality, to our investors, partners and customers for believing in what we are building together. Read more: waabi.ai/insights/waabi…
We have built a Physical AI Platform that enables true scale and generalizes across form factors, geographies, and environments. It is proven in autonomous trucking and we are now expanding to robotaxis. Learn about what we are building: waabi.ai/insights/waabi…
Today, we are thrilled to announce that we have raised $1B USD of new capital to accelerate commercial progress in autonomous trucks and expand to robotaxis! For the first time in the industry, this enables one shared brain to power both applications—trucks and robotaxis. This means any progress in one vertical directly improves the other. This funding includes an oversubscribed $750M Series C round led by @khoslaventures and @G2VPLLC, as well as additional capital from @Uber tied to robotaxi development. We are excited to work with Uber to deploy 25,000 or more Waabi Driver-powered robotaxis on the Uber platform, substantially accelerating the adoption of robotaxis at scale. Thank you to our incredible team, investors, partners, and customers for helping us achieve this milestone. Here's to pioneering the future of Physical AI, together.

Bring new robot testing environments to life with @theworldlabs and Isaac Sim. 🤖 If you can describe a world 🌎, you can start testing in it the same day. Learn how to: 1. Export scenes from World Labs' Marble as Gaussian splats 2. Convert to USD using @nvidiaomniverse NuRec 3. Import into NVIDIA Isaac Sim 4. Add a robot and run the simulation Read the guide ➡️ nvda.ws/3N4Yf5K #SIGGRAPHAsia2025

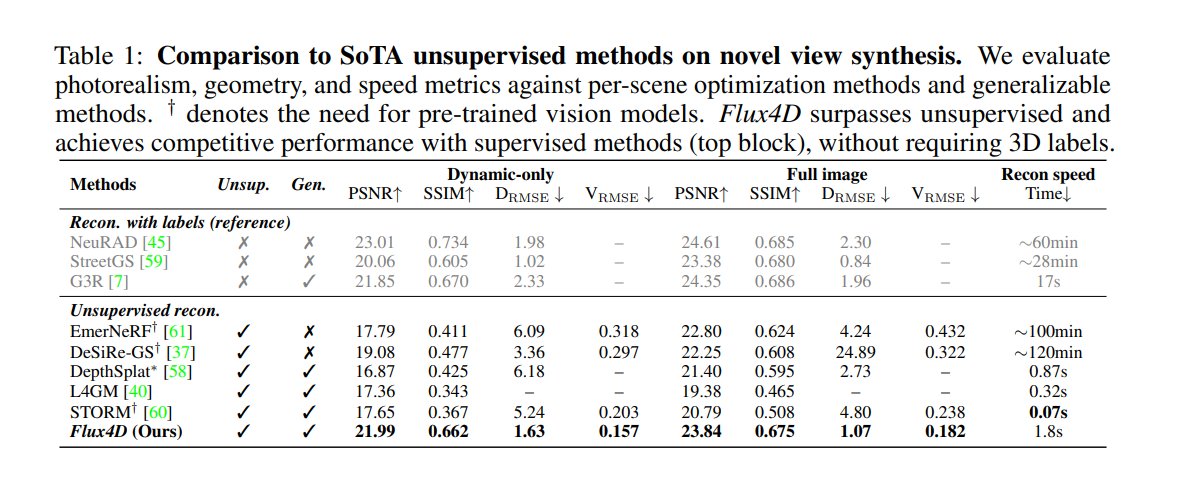
Flux4D: Flow-based Unsupervised 4D Reconstruction Abstract (excerpt): Flux4D is a simple and scalable framework for 4D reconstruction of large-scale dynamic scenes. It directly predicts 3D Gaussians and their motion dynamics to reconstruct sensor observations in a fully unsupervised manner. By adopting only photometric losses and enforcing an "as static as possible" regularization, Flux4D learns to decompose dynamic elements directly from raw data without requiring pre-trained supervised models or foundational priors. This is achieved simply by training across many scenes. Our approach enables efficient reconstruction of dynamic scenes within seconds, scales effectively to large datasets, and generalizes well to unseen environments, including rare and unknown objects. Experiments on outdoor driving datasets show that Flux4D significantly outperforms existing methods in scalability, generalization, and reconstruction quality.
Flux4D: Flow-based Unsupervised 4D Reconstruction @wangjksjtu, @hungdche, @ycchen918, @yangze0930, @lily_goli, Sivabalan Manivasagam, @RaquelUrtasun tl;dr: photometric losses and simple static-preference prior arxiv.org/abs/2512.03210



Check out our work on unsupervised generalizable 4D reconstruction for driving scenes!

Can we reconstruct dynamic driving scenes without any labels? Check our #NeurIPS2025 paper Flux4D, a flow-based, generalizable, unsupervised 4D reconstruction model that scales to real-world driving data! Website: waabi.ai/flux4d Arxiv: arxiv.org/abs/2512.03210 [1/n]
@_advaitpatel massive w lore fr. a couple of robotic research experiences mentioned so maybe phd in near future? 👀

Albert Zhai @alb_zhai
11 Followers 54 Following CS PhD @ UIUC | BS @Caltech | vision, robotics, a little bit of trolling


Aditya Potnis @aditya_potnis
31 Followers 384 Following Embodied Reasoning for Robots | CS MS @ @siebelschool @UofIllinois | MechE @ COEP I make things that move
Xuanchi Ren @xuanchi13
1K Followers 584 Following Senior Research Scientist @NVIDIAAI. PhD @UofTCompSci. Working on GenAI and world models
Qiao Gu @qiaogu1997
569 Followers 306 Following CS PhD student at UofT | Interning at NVIDIA | Ex-Meta, CMU, HKUST.
Kulbir Singh Ahluwali... @Kulbir_Singh_
210 Followers 2K Following CS PhD student, TA for CS444: DL for CV, CS498GC: Mobile Robotics, Research Areas: Physical AI, Natural language grounding, Robot learning, Field Robotics

Anh Nguyen @NguynTu24128917
1K Followers 7K Following Member of Technical Staff @prometheusinc ex Foundation Model @Apple, Phi @MSFTResearch
William Shen @WillShenSaysHi
458 Followers 329 Following PhD Student at @MIT_CSAIL @MIT_LISLab. Previously @Apple @NVIDIA. Working on AI + Robotics. From 🇳🇿
M. V. Cunhas @mvcinvesthing
127 Followers 4K Following Long-term investor. BSc in Economics, MSc in Finance. Equity Analyst with a focus on Fundamental Analysis and Valuation. Not a financial advisor.
Yuanjun Chai @YuanjunChai
25 Followers 324 Following UW MSEE @UW @uw_ece @uwnlp 🎄 Look for 26 Fall PhD and research intern
Gireesh Nandiraju @girish_432
478 Followers 1K Following 2nd yr CS PhD @PKU1898 @GalbotRobotics. Previously @iiit_hyderabad @UCSanDiego @bitspilaniindia. Focusing on long-horizon RL for embodied robotics tasks.
Yutong Liang @YutongLiang_
203 Followers 417 Following Robotics @UCSanDiego | Character Animation @PKU1898

Zihan Wang @Z1hanW
339 Followers 216 Following 4D vision + Robotics | Research Intern @ Frontier AI & Robotics (FAR), Amazon

Keyu Zhu @Kit_Key_
23 Followers 304 Following 🤖Robotics | Generative Models | World Models | @SUSTechSZ CSE '27
Jason Lee @jason_lee328
388 Followers 626 Following Incoming CS PhD @Stanford @allen_ai // Prev @uw.
Ryan Punamiya @ryan_punamiya
662 Followers 322 Following Research Scientist @nvidia GEAR | @GeorgiaTech | all views are my own
OwO @ShigonOwO
12 Followers 2K Following
Lily Goli @lily_goli
654 Followers 274 Following CS PhD Student @UofT, intern @wayve_ai | Ex visiting student @berkeley_ai, Ex student researcher @GoogleDeepMind and @waabi_ai
Zhenjun Zhao @zhenjun_zhao
7K Followers 2K Following Postdoc @unizar | PhD @CUHKofficial | 3D vision, SLAM, Image matching (https://t.co/WZzEImwX03)
Tony @Tony65422626741
52 Followers 1K Following
Joyce Yang @ajyang99
208 Followers 259 Following PhD candidate @UofT / @VectorInst. Senior researcher @Waabi_ai 🚙 🚚 🚛
Carissa @9SXujErZ9wDHmG3
56 Followers 1K Following Confidence is not “they will like me.” Confidence is “I’ll be fine if they don’t.”
Summer @Whador82994
51 Followers 1K Following
Jiaying Fang @jiaying_fang0
82 Followers 117 Following Robotics PhD @Cornell | MS EE @Stanford | RA @StanfordIPRL

Hongchi Xia @hongchix
137 Followers 43 Following Hi here is Hongchi Xia, a Ph.D. student in Computer Science at UIUC, My research lies in 3D computer vision. https://t.co/HBqneK3sGZ
尺绫香 @BrandanKay29640
4 Followers 204 Following 【AI無料診断】今なら無料!今すぐ参加""" 🌟📈🔥 完璧な市場参入ポイントで ROI を最大化しましょう!🚀 日本のアカウント保有者100名限定! 💼💰
Hanxiao Jiang @jiang_hanxiao
684 Followers 694 Following Ph.D. student @Columbia. Research interest: Robot Learning, Robot Vision, 3D Vision
xeets ._. @_Xeets
190 Followers 5K Following small account enjoyer; building (in silence) a _______ for the ages


Deseighth @Deseighth9dEut
64 Followers 4K Following
Jae (Jaewook) Lee @jaewook_jae
736 Followers 690 Following 🇺🇸🇰🇷 | PhD student @uwcse @makeabilitylab | intern @apple | @NSF Fellow | #HCI #AR #AI #a11y | Prev @MSFTResearch @NianticSpatial @meta @nasa
Forseit- Intel Corpor... @Forseit1
355 Followers 7K Following

Kaiqu Liang @kaiqu_liang
2K Followers 614 Following PhD Student @PrincetonCS | Anthropic Fellow | Interned @Meta | Human-AI Alignment & Safety | MPhil @Cambridge_Uni | BSc @UofT
Gu Zhang @Gu__Zhang
635 Followers 524 Following CS PhD @Tsinghua_IIIS | Prev. Student Researcher @MIT_CSAIL @SJTU1896 | Research interest focus on dexterous manipulation
Mehdi Dadvar @medadvar
42 Followers 150 Following AI and Robotics | Safe Autonomy | Ph.D. Student @AAIRLabASU
Jiateng Liu @JiatengLiu
125 Followers 132 Following Interesting NLP Applications & Multimodality & Agents PhD Candidate @uiuc_nlp , Blender Lab Intern# @Amazon Alexa AI, @Adobe Adobe Research
sigrobotics @sigrobotics
740 Followers 89 Following uiuc special interest group for robotics | making robots go brrr, creators of LeKiwi if you'd like to sponsor us, dm or email [email protected]
Kensuke Nakamura @kensukenk
420 Followers 340 Following Ph.D. Student @CMU_Robotics, @princeton '23 he/him. NSF GRFP Fellow, 2025 HRI Pioneer.
Yixuan Wang @YXWangBot
2K Followers 1K Following CS Ph.D. student @Columbia & Research Scientist @NVIDIARobotic | Prev. Meta FAIR Embodied AI, Boston Dynamics AI Institute, Google X #Vision #Robotics #Learning
Yuki Wang @YukiWang_hw
95 Followers 124 Following Third Year CS Ph.D. Student at Cornell University @CornellCIS A member of the PoRTaL group @PortalCornell!
Weijie Wang @wjwang2003
474 Followers 134 Following PhD student at ZIP Lab, Zhejiang University Research Intern @ ByteDance Seed | Microsoft Research
Albert Zhai @alb_zhai
11 Followers 54 Following CS PhD @ UIUC | BS @Caltech | vision, robotics, a little bit of trolling
Katie Bouman @klbouman
7K Followers 0 Following Professor of CMS/EE/Astronomy @Caltech; Computational Imaging, Computer Vision, and Machine Learning
Georgia Chalvatzaki @GeorgiaChal
6K Followers 2K Following Professor @CS_TUDarmstadt, @hessian_AI, AI Emmy Noether @dfg_public, #ERCStG SIREN, #AlfriedKruppFörderpreis, co-chair TC @MobileManip & chair WiE @ieeeras
Yanpei Cao @yanpei_cao
2K Followers 1K Following Chief Scientist @VastAIResearch @tripoai. Prev: Principal Researcher @TencentGlobal, Kuaishou (HKG:1024), CTO @OwliiTech (acq. by Kuaishou), @Tsinghua_Uni.
Raktim Gautam Goswami @raktimgg
433 Followers 170 Following PhD Student @nyuniversity | Research Intern @amilabs | Prev @AIatMeta | Electrical Engineer from @IITHyderabad
Nicolas Sereyjol-Garr... @sg_nicolas
55 Followers 70 Following PhD student at @valeoai and @ImagineEnpc
Fangfu Liu @fangfu0830
760 Followers 633 Following Ph.D. in Tsinghua University. Interests in World Model & Spatial Intelligence
Tamar Rott Shaham @TamarRottShaham
717 Followers 456 Following Incoming assistant prof at @WeizmannScience, postdoctoral fellow at @MIT_csail

Artem Zholus @artemZholus
556 Followers 595 Following Visiting Researcher @AIatMeta; PhD @Mila_Quebec. Ex: Intern @GoogleDeepMind, Intern @EPFL, @IgluContest, MSc@MIPT; @InSilicoMeds
Qi Wu @wilson_over
183 Followers 347 Following Applied research scientists at NVIDIA. Views and opinions are my own and do not represent those of my employer, NVIDIA.
Yifan Lu @YifanLu17525599
53 Followers 95 Following Researcher @ NVIDIA Spatial Intelligence Lab PhD Student @ University of Toronto
Jiahui Zhang @JiahuiZhang__32
212 Followers 910 Following PhD @IRVLUTD | Prev: RA @USC CLVR lab, Lira Lab | Intern @ Horizon Robotics | Master @USC
Jiahao Wang @jiahaowg
72 Followers 167 Following CS PhD Student @JohnsHopkins | Intern @Waymo | #CV #ML #AI

Jaskirat Singh @1jaskiratsingh
730 Followers 551 Following Ph.D. Candidate | Intern @AIatMeta | @AdobeResearch | Representations for generation and Reasoning Agents | R2E-Gym | DeepSWE | REPA-E | iREPA | RAEv2
Hongxun Wu @HongxunWu
2K Followers 396 Following Researcher @OpenAI. Was a grad student at Berkeley theory group.
Liyuan Zhu @liyuan_zz
618 Followers 593 Following PhD candidate @Stanford | Research scientist intern @NvidiaAI | MS @ETH Zurich. Computer Vision and Machine Learning. Opinions are my own.
Haotian Zhang @HaotianZhang4AI
1K Followers 613 Following Research Scientist @ NVIDIA Cosmos. Ex- Apple, MSR AI. Ph.D. @ UW. Be Borderless.
Samarth Sinha @_sam_sinha_
6K Followers 319 Following Scaling World Models @1x_tech Prev: Founding Team @LumaLabsAI, PhD (Dropout 😶🌫️) @UofT, @AIatMeta, @Mila_Quebec 🇨🇦
Iro Armeni @ir0armeni
2K Followers 218 Following Assistant Prof @Stanford CEE | Gradient Spaces Group. Researching #ComputerVision to transform #Design & #Construction | https://t.co/27cilI29Bt

Long Lian @LongTonyLian
999 Followers 468 Following Researcher at @thinkymachines. EECS @berkeley_ai. RL for reasoning and agentic systems with LLMs/VLMs. Opinions are my own. Prev: @AIatMeta, @nvidia.
Recursive @Recursive_SI
6K Followers 0 Following Recursive self-improving superintelligence to automate knowledge discovery.
Ani Kembhavi @anikembhavi
4K Followers 330 Following AI Research @meta Former Director @wayve_ai @allen_ai. Best/Outstanding papers at CVPR, Neurips, CoRL, IROS and ICRA.
Ben Pekarek @ben_pekarek
399 Followers 231 Following Technical staff @GeneralistAI, formerly doing robot learning @Stanford REAL
Le Thien Phuc Nguyen ... @nguyenp2004
37 Followers 152 Following Incoming CS PhD @unccs | Prev: Undergraduate Researcher @ Wisconsin AI Vision Lab, UW - Madison
evo-devo @Xiaojie_Qiu
5K Followers 2K Following Assistant Prof. @ Stanford BASE, Genetics & CS (courtesy). Lead the predictive genomics lab. Come to work with us to build the first AI virtual embryo model!
Peter Pao-Huang @peterpaohuang
661 Followers 174 Following CS PhD student @Stanford | ML + biomedicine
Robin Rombach @robrombach
13K Followers 563 Following Krawallkrümel. Generative Models at https://t.co/1xqMb617gc, made with ❤️
Mira Murati @miramurati
638K Followers 617 Following Now building @thinkymachines. Previously CTO @OpenAI
Chin-Yi Cheng @chinyich
3K Followers 473 Following co-founder and ceo at illoca | ai for aec | ex-google deepmind | ex-autodesk ai lab
Genesis AI @gs_ai_
11K Followers 0 Following Genesis AI is a global full-stack robotics company building general-purpose robots with human-level intelligence.
Zu Wang @zuwang95
1K Followers 852 Following training models at Genesis AI. Build by humans, for humans.
Michelle Lee @michellearning
9K Followers 1K Following Founder & CEO of @medra_ai. Let's eradicate disease. Prev. phd @StanfordAILab, robotics @nvidia, propulsion @SpaceX. Loosely hinged.
François Fleuret @francoisfleuret
52K Followers 471 Following Research Scientist @meta (FAIR), Prof. @Unige_en, co-founder @neural_concept_. I like reality.
Vinayak Gupta @Vinayak22Gupta
51 Followers 87 Following PhD Student at University of Maryland, College Park
Zhengyang Geng @ZhengyangGeng
2K Followers 667 Following PhD student with @zicokolter / curiosity&love / dynamics / intern of super intelligence
Hansen Lillemark @hansenlillemark
462 Followers 263 Following CSE PhD @UCSanDiego. prev @berkeley_ai @newtheoryai Structured generative models, world models, ML architecture design
Andy Keller @t_andy_keller
4K Followers 2K Following Postdoctoral Fellow at The Kempner Institute at Harvard University -- Somewhere between Brains & Bits. PhD at UvA, Intern @ Apple MLR, Prev @ Intel AI & Nervana
Benhao Huang @huskydogewoof
1K Followers 764 Following Attracted by Loop Models➰and World Models 🌎 | M.S. student @mldcmu, Prev. @sjtu1896 | Opinions approved by my puppy.
Shane Gu @shaneguML
50K Followers 2K Following Gemini/Omni Thinking, Senior Staff AE @GoogleDeepMind. 🇯🇵-born 🇨🇳🇨🇦. ex: Gemini 1.5-3, GPT-4 @OpenAI, Google Robotics (JP: @shanegJP). Personal opinions.
Pratik Kunapuli @PKunapuli
186 Followers 276 Following Research Engineer @EkaRobotics. CIS PhD UPenn. RL, Robotics, Dynamics and Control. NSF GRFP Fellow.
Kristian Hartikainen @kristianhartika
301 Followers 55 Following Founding engineer / Head of Software at @EkaRobotics.
Tuomas Haarnoja @haarnoja
4K Followers 74 Following Co-Founder of Eka Robotics, previously Research Scientist @DeepMind, PhD @berkeley_ai and Student Researcher @GoogleAI
Massimiliano Viola �... @massiviola01
845 Followers 150 Following ML @ Bedrock Robotics | Ex Stanford, ETH Zurich | Computer Vision • 3D • Generative Models

You might like