-
Tweets61
-
Followers163
-
Following323
-
Likes303
@baaadas didn't know innates get topdecked if you have more then 10. saving this for my next clone run
Releasing RecGen: a collaboration between @ToyotaResearch, @toyota_europe, and @UvA_Amsterdam tackling a core 3D vision challenge: reconstructing complete multi-object scenes (parts, poses, textures, even occluded geometry) from just 1 to a few RGB-D views. Trained purely on synthetic data, RecGen achieves SOTA on real-world robotics and 6D pose benchmarks, handling occlusions, symmetry, and complex interactions. A step toward scalable, high-fidelity digital twins for robotics, and better evaluation and training of generalist policies. reconstruction-by-generation.github.io
I’d previously thought that single-view reconstruction would be tough with only synthetic data, but it turns out it’s not! Check out this very cool work applying procedural 3D data to *full* reconstruction.
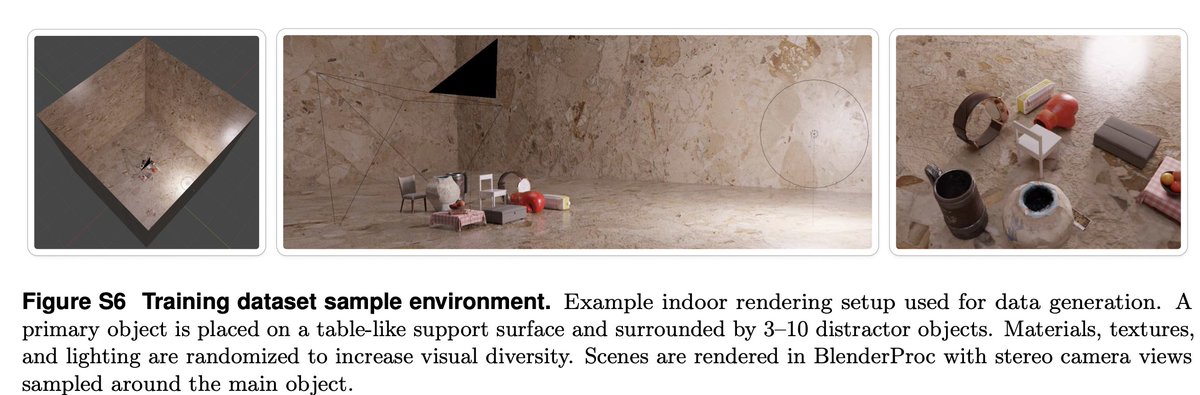
Releasing RecGen: a collaboration between @ToyotaResearch, @toyota_europe, and @UvA_Amsterdam tackling a core 3D vision challenge: reconstructing complete multi-object scenes (parts, poses, textures, even occluded geometry) from just 1 to a few RGB-D views. Trained purely on
@holoday_ The baselines we use are wider than that (>4 cm), but you can always change the code to generate your own. You should definitely check out @_ilya_c's very great work on this (though they consider the unsupervised setting). arxiv.org/abs/2212.12324
Stereo depth is important in robotics, and relies heavily on synthetic data. But what actually makes for good synthetic data? In WMGStereo, we study dataset design and discover a powerful data recipe - just 500 samples of our data can match 40k Sceneflow samples! 🧵[1/7]
Our work is open-source and you can also check it out in-person at our #CVPR2026 Highlight this summer! Dataset: huggingface.co/datasets/princ… Code: github.com/princeton-vl/I… [7/7]
By collecting the best design choices from our study, we create a full-scale dataset, WMGStereo-150k. Our data is super sample efficient and scales well! [6/7]

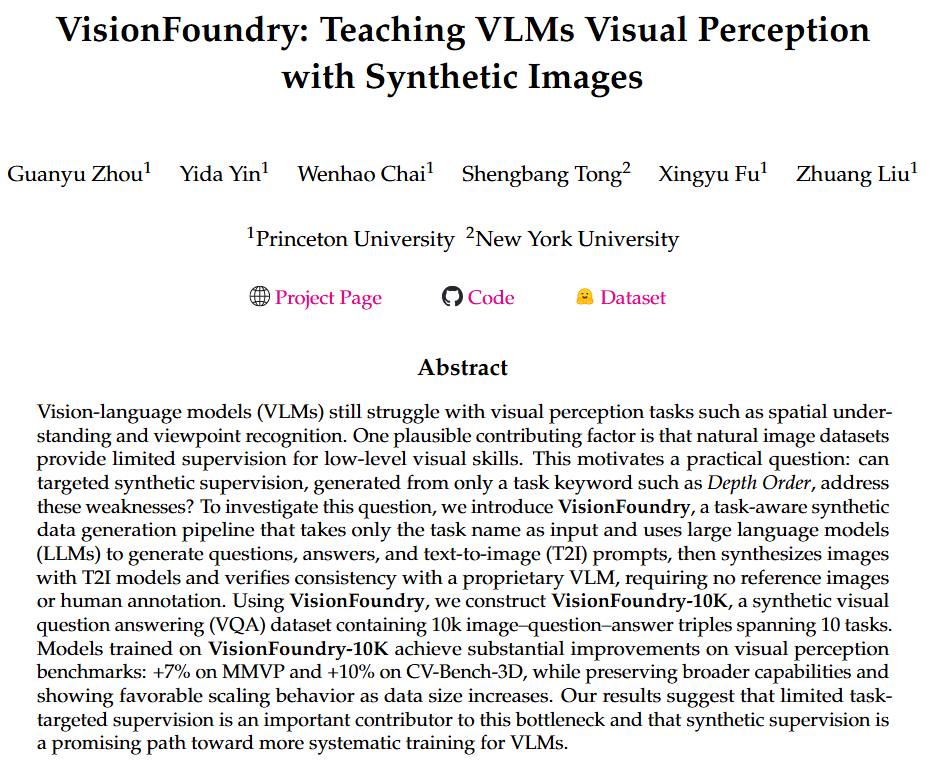
It's time to systematically teach VLMs to see with synthetic images! We built VisionFoundry, a simple but intuitive framework that generates synthetic image datasets from only a task name. 10k synthetic data → over +10% improvement on visual perception benchmarks 👀
Video models surprisingly can solve mazes, but inconsistently. We understand little about how they reason, making it hard to use such abilities. We investigate the denoising process and find models commit to a plan early, letting us screen far more candidates for better perf. 🧵

Excited to share our new paper on sharp capacity scaling of the Muon optimizer! Joint work with @EshaanNichani Denny Wu @albertobietti @jasondeanlee: arxiv.org/abs/2603.26554 (1/7)

ML interview question: You’re training a 72B MoE MNIST classifier. Layer 53 MLP expert 7 destabilizes when the ones in the dataset are turned upside down. What happened?

Stereo depth is highly useful for robots. Meet WAFT-Stereo: #1 on ETH3D (BP-0.5), Middlebury (RMSE), and KITTI (all metrics); 61% less zero-shot ETH3D BP-0.5 error; 1.8-6.7x faster than prior SOTA. Key idea: classify disparity into bins, then iterative high-res warping.🧵1/2

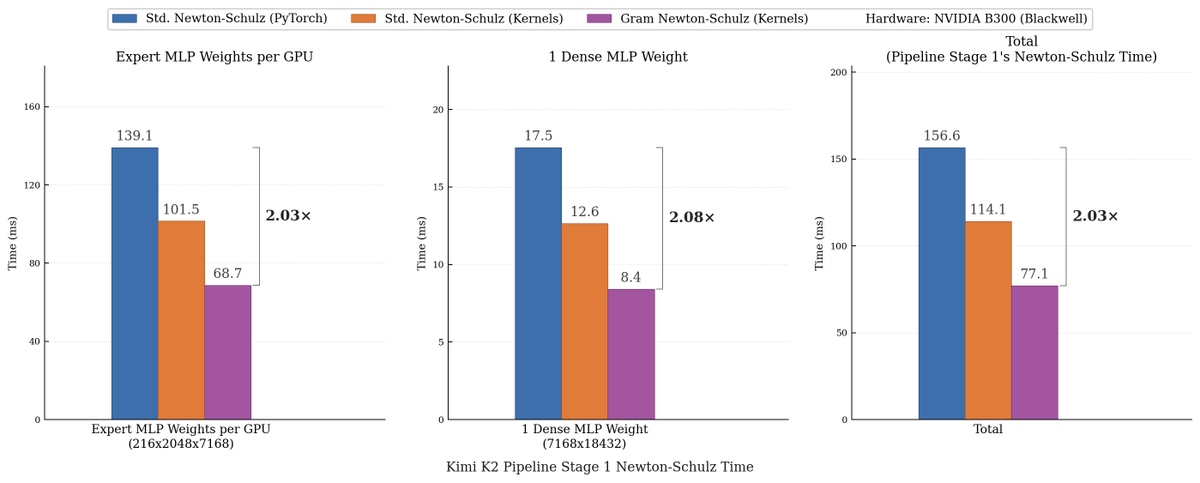
We made Muon run up to 2x faster for free! Introducing Gram Newton-Schulz: a mathematically equivalent but computationally faster Newton-Schulz algorithm for polar decomposition. Gram Newton-Schulz rewrites Newton-Schulz such that instead of iterating on the expensive rectangular X matrix, we iterate on the small, square, symmetric XX^T Gram matrix to reduce FLOPs. This allows us to make more use of fast symmetric GEMM kernels on Hopper and Blackwell, halving the FLOPs of each of those GEMMs. Gram Newton-Schulz is a drop-in replacement of Newton-Schulz for your Muon use case: we see validation perplexity preserved within 0.01, and share our (long!) journey stabilizing this algorithm and ensuring that training quality is preserved above all else. This was a super fun project with @noahamsel, @berlinchen, and @tri_dao that spanned theory, numerical analysis, and ML systems! Blog and codebase linked below 🧵

Prime (Shengqu) Cai @prime_cai
2K Followers 616 Following cs phd @stanford | prev. @eth | I work on long context, generative models, and large-scale training infra
Karhan Kayan @karhankkayan
4 Followers 73 Following

Tanushree Banerjee @_tbanerjee
38 Followers 264 Following PhD @umdcs in Computer Vision and Graphics, previously BSE @PrincetonCS
Delta Institute @DeltaInstitutes
3K Followers 3K Following Supporting exceptional researchers and engineers, from academia to industry and beyond.

Donk @QiZheng99560477
1 Followers 15 Following
Teresa Chole @TeresaChole854
20 Followers 299 Following

Hughyang666 @Hughyang6688401
0 Followers 121 Following
Sergey Zakharov @ZakharovSergeyN
456 Followers 227 Following ML Research Scientist & Team Lead @ToyotaResearch.
friday fang @FangFriday
11 Followers 891 Following



Dov Reshef @dov_reshef
12 Followers 2K Following
Xindi Wu @cindy_x_wu
5K Followers 1K Following PhD student @PrincetonCS | Data-centric multimodal ml | prev @roboVisionCMU @CMU_Robotics | @NVIDIAAI @RealityLabs @Snapchat
Harness Engineering @harnessengr
250K Followers 11K Following The more things change, the more they stay the same. DM for repost
Kaleb Newman @kalebnewman8
38 Followers 55 Following PhD Student @Princeton @VisualAILab 👨🏾💻 | @BrownUniversity alum
Yu Lei @_OutofMemory_
624 Followers 2K Following PhD student @UTCompSci | Learn to understand ourselves and build intelligence.🤖🧠👁️
Patrick Yin @patrickhyin
454 Followers 286 Following phd @uwcse, student researcher @microsoft, undergrad @berkeleyai


Joseph Tung @jt_tung
71 Followers 277 Following CS PhD Student @NYU_Courant. Prev @Cornell. 3D Computer Vision 🌆
Nick James @IsotropicPBNJ
121 Followers 584 Following math and comparative literature @princeton | cofounder of https://t.co/b8lRjGXJwO
Энрико @Crypto_Psyker
11 Followers 118 Following OffSec - reverse engineering Engenharia de Computação
tesavova @tesavova
335 Followers 8K Following
Joe Rupertus @joerupertus
139 Followers 581 Following CS @ Princeton. Indie Developer & Swift Student Challenge Winner.
Chris @sp1cyjuice
1 Followers 99 Following


Xingyu Fu @XingyuFu2
2K Followers 850 Following Postdoc Fellow @PrincetonPLI | PhD @Penn @cogcomp. | Focused on Vision+Language | Previous: @MSFTResearch @AmazonScience B.S. @UofIllinois | ⛳️😺
ft @SFettah97768
36 Followers 2K Following
Pedro Diaz @pd1az
216 Followers 4K Following
Soufiane @zememphis
6 Followers 167 Following
tianbao zhang @bruce_ztb
23 Followers 560 Following
Kun Tao @KunTao221218
19 Followers 792 Following Robotics&AI Student @Tu_Muenchen, Research Assistant @TUM_MIRMI, 2026/2027looking for the PhD in USA 🇺🇸! #Robotics, #AI
👹 @saykodelikzade
0 Followers 2K Following
bim-2025 @RogerYau8761
3 Followers 776 Following
RicLuonaerduo @RLuonaerdu46707
90 Followers 4K Following
Nathan 🇺🇲 @EarthlingNathan
5K Followers 7K Following Brains are chemistry-based computers. All information is physical. Reality is the truth. Science measures it. Sustainable love is Humanism. #FBR #EPluribusUnum
brian-machado-high-in... @sincethestudy
8K Followers 590 Following CEO, founder, and building a billion robots @bracketbot interned @ UberATG, GoogleX, Samsung Research, Tesla Optimus school @ Waterloo Mechatronics
Khoa Tuan Nguyen @Khoa_NguyenTuan
874 Followers 7K Following Enjoy learning new things. PhD student at Ghent University Global Campus in Korea.
PaperTiger @PaperTiger518
0 Followers 16 Following
猫型ねこ @fjnyan__
145 Followers 1K Following Computer Vision / 3D Vision / Machine Learning / AI / グリーンシャバッシュミントン
Chengxuan Qian✈️C... @chengxuanqian
198 Followers 1K Following Incoming CS PhD @UCSB | Multimodal GenAI & World Models


vini @apeiron_spx
281 Followers 723 Following 🌌🚀 computer engineering student - space enthusiast @apeiron_priv

Songyou Peng @songyoupeng
9K Followers 789 Following Teaching multimodality to Gemini, Nano Banana, and more @GoogleDeepMind. PhD from @ETH and @MPI_IS.
Prime (Shengqu) Cai @prime_cai
2K Followers 616 Following cs phd @stanford | prev. @eth | I work on long context, generative models, and large-scale training infra

flaw @flawedaxioms
3K Followers 2K Following future former fool, 24. applied math guy. sweng @ bigtech
toucan @ less.o + man... @distributionat
6K Followers 890 Following toucan beaks are models of lightweight strength • prev @AnthropicAI @scale_AI
Karhan Kayan @karhankkayan
4 Followers 73 Following
Gabe Grand @gabe_grand
2K Followers 356 Following PhD student @MIT CSAIL: 🤖 & 🧠 Prev: @GoogleAI, @ReverieLabs, @Harvard CS dreamcoder & vibecoder
Oier Mees @oier_mees
5K Followers 337 Following Robot Learning & Foundation Models @microsoft & External Lecturer @ETH. Prev. postdoc at @berkeley_ai. PhD @UniFreiburg. Prev. intern @NVIDIAAI.
Delta Institute @DeltaInstitutes
3K Followers 3K Following Supporting exceptional researchers and engineers, from academia to industry and beyond.



Jiawei Yang @JiaweiYang118
2K Followers 972 Following Final-year PhD at USC. I love simple designs that scale and generalize. Intelligence is knowledgeable & functional context. Interned at @GoogleDeepMind, @NVIDIA
Srinath Mahankali @srinathm1359
209 Followers 266 Following Research Engineer @ekarobotics | Robotics & RL @ MIT
Zubair Irshad @mzubairirshad
2K Followers 2K Following Research Scientist @ToyotaResearch | PhD in AI and DL @GeorgiaTech | Researching Large Behavioral Models | 3D Vision | Robotics
Sicheng Li @JasonLsc22
196 Followers 1K Following SteerNeRF, NeRFCodec, GSCodec_Studio. PhD student @ ZJU
Sergey Zakharov @ZakharovSergeyN
456 Followers 227 Following ML Research Scientist & Team Lead @ToyotaResearch.
Amir Zamir @zamir_ar
5K Followers 643 Following Assistant Prof of CS, @EPFL_en Swiss Federal Institute of Technology Lausanne. Previously @Berkeley_AI, @StanfordAILab, @ucf. Into Vision, MachineLearning, AI
Peter Henderson @PeterHndrsn
6K Followers 983 Following Assistant Professor @ Princeton (RL+strategic decisionmaking+Law). Prev: Stanford (JD/PhD); McGill/Mila; Meta FAIR; Amazon; Cal Supreme Court.


claire night skies�... @clairebookworm
4K Followers 2K Following member of technical yap-ademia & (increasingly) amateur sleeper, #1 @bleachersmusic fan ੯‧̀͡⬮ || @mcgovernmit @hackclub @thielfellowship
Shangbang Long @ShangbangLong
558 Followers 228 Following Research Scientist @ Google DeepMind Multimodal understanding and generation. AGI for ALL.

David @DavidSHolz
102K Followers 10K Following founder @midjourney, previously founded leap motion, before that was at nasa and max planck - vibeposting @davidvibesonly
Yu Lei @_OutofMemory_
624 Followers 2K Following PhD student @UTCompSci | Learn to understand ourselves and build intelligence.🤖🧠👁️
Huihan Liu @huihan_liu
4K Followers 900 Following CS PhD @UTAustin | 🤖 Robot Learning & Embodied Agent | @berkeley_ai @AIatMeta @MSFTResearch | 🏆 RSS Best Paper Finalist | 🏆 ICRA Outstanding Learning Paper
Felipe Doria @itsFelipeDoria
198 Followers 155 Following phd-ing @mit, cause prioritization @coeff_giving
alz @alz_zyd_
33K Followers 18K Following pfp by @ShizzyAizawa. Post-Newtonian heterodox economist. Inventor of the JvN hypothesis. World champion of econ/food ragebait. Hermit savant. Omakase critic

Rikiya Takehi @rikiyatakehi
1K Followers 310 Following Incoming PhD @MIT CSAIL, interning @nvidiaAI Toyota PhD Fellow | B.Eng. @waseda_univ 日本語→ @rikiyatakehi_jp
Nick James @IsotropicPBNJ
121 Followers 584 Following math and comparative literature @princeton | cofounder of https://t.co/b8lRjGXJwO
Joseph Tung @jt_tung
71 Followers 277 Following CS PhD Student @NYU_Courant. Prev @Cornell. 3D Computer Vision 🌆
Wenlong Huang @ CVPR @wenlong_huang
6K Followers 1K Following PhD Student @StanfordSVL. Previously @MIT_CSAIL @Berkeley_AI @GoogleDeepMind @NVIDIARobotics. Robotics, Foundation Models, Spatial Intelligence.
Marc Mapeke @marcmapeke
66 Followers 455 Following 3d vision research (big + small models) @realitylabs. @brownvisualcomp alum. tweet = my personal opinions. creativity, learning, perception, and action ≥≥≥


Joseph Suarez 🐡 @jsuarez
29K Followers 123 Following I build sane open-source RL tools. MIT PhD, creator of Neural MMO and founder of PufferAI. DM for business: non-LLM sim engineering, RL R&D, infra & support.
kotohibi @kotohibi_3d
2K Followers 680 Following 3D Viz Engineer | SuperSplat: https://t.co/w0HcpelFYv | ArrivalSpace: https://t.co/un0Bl1kYPl | Youtube: https://t.co/NHQugxaFSb | my 3DGS tools: https://t.co/iNkFrX82F3 | DM me :)
Kashu Yamazaki @kashu_yamazaki
3K Followers 702 Following Ph.D. student in Robotics & AI @LTIatCMU with @KaterinaFragiad Interests are: Multimodal / Embodied AI / Robot Learning
Rafael Spring @Rafael_L_Spring
2K Followers 1K Following Founder @dotproduct3d Prev. Founder @ Enkin AR (acq‘d by Google) SLAM / Sensor Fusion / 3D Capture GPU poor



Guanyu Zhou @TMartyr4951
135 Followers 225 Following Research Intern @PrincetonCS. Building better multimodal intelligence.
Xingyu Fu @XingyuFu2
2K Followers 850 Following Postdoc Fellow @PrincetonPLI | PhD @Penn @cogcomp. | Focused on Vision+Language | Previous: @MSFTResearch @AmazonScience B.S. @UofIllinois | ⛳️😺
Peter Tong @TongPetersb
4K Followers 253 Following Berkeley 23', CS PhD Student in NYU Courant advised by Professor @ylecun and Professor @sainingxie
Zhuang Liu @liuzhuang1234
12K Followers 1K Following Assistant Professor @PrincetonCS. deep learning, vision, models. previously @MetaAI, @UCBerkeley, @Tsinghua_Uni

Stephen Xie @stephenx_
752 Followers 912 Following working with actors and models @xai | views are my ownTrends for United States
You might like